2026
.gif)
RIPNEON: Memory-Lite and Computation-Efficient Occupancy Mapping via Block Read-Write and Key Grids Expansion
Qianli Dong, Xuebo Zhang, Shiyong Zhang, Haobo Xi, Ziyu Wang, Zhe Ma, Haobo Xi, Zhiyong Zhang
IEEE Conference on Robotics and Automation (ICRA)Accepted. 2026
In this work, we propose a memory-lite and computation-efficient occupancy mapping algorithm for LiDAR-based robotic exploration plan- ning. To accelerate the query operation and reduce the memory usage, we adopt the grid-block as the basic data structure and propose to dynamically read and write blocks around the sensor. For each block, the occupied grids and frontier grids are maintained in two separate lists, serving as key grids for the map update. Instead of updating free grids by ray-racasting, we propose a key grids expansion algorithm to avoid repetitively querying grids on casted beams. The proposed algorithm not only speeds up the occupancy map update but also detects the frontier grids, which are crucial for exploration tasks, without extra computation. We compare the proposed method with state-of-the-art mapping methods on the KITTI dataset and a self-collected dataset.
RIPNEON: Memory-Lite and Computation-Efficient Occupancy Mapping via Block Read-Write and Key Grids Expansion
Qianli Dong, Xuebo Zhang, Shiyong Zhang, Haobo Xi, Ziyu Wang, Zhe Ma, Haobo Xi, Zhiyong Zhang
IEEE Conference on Robotics and Automation (ICRA)Accepted. 2026
In this work, we propose a memory-lite and computation-efficient occupancy mapping algorithm for LiDAR-based robotic exploration plan- ning. To accelerate the query operation and reduce the memory usage, we adopt the grid-block as the basic data structure and propose to dynamically read and write blocks around the sensor. For each block, the occupied grids and frontier grids are maintained in two separate lists, serving as key grids for the map update. Instead of updating free grids by ray-racasting, we propose a key grids expansion algorithm to avoid repetitively querying grids on casted beams. The proposed algorithm not only speeds up the occupancy map update but also detects the frontier grids, which are crucial for exploration tasks, without extra computation. We compare the proposed method with state-of-the-art mapping methods on the KITTI dataset and a self-collected dataset.
.gif)
Fast Exploration Planning with Learning-Based Motion Time Prediction for Aerial Robots
Ziyu Wang*, Qianli Dong*, Xuebo Zhang, Shiyong Zhang, Haobo Xi, Zhe Ma, Mingxing Yuan (* equal contribution)
IEEE Conference on Robotics and Automation (ICRA)Accepted. 2026
In this article, we propose an efficient dual-layer exploration planning method. The insight of our dual-layer planning method is efficiently finding an acceptable long-term region routing and greedily exploring the target in the first region of routing at high speed. Specifically, we propose a long-term region routing approximate algorithm, called “exploration-oriented heuristic double-tree algorithm”, to ensure real-time planning in large-scale environments. Then, the viewpoint in the first routing region with the highest curvature-penalized score, which can effectively reduce decelerations caused by sharp turn motions, will be chosen as the next exploration target. To further speed up the exploration, we propose an aggressive and safe exploration-oriented trajectory planning approach to enhance exploration continuity and speed. The proposed method is compared with state-of-the-art methods in challenging simulation environments.
Fast Exploration Planning with Learning-Based Motion Time Prediction for Aerial Robots
Ziyu Wang*, Qianli Dong*, Xuebo Zhang, Shiyong Zhang, Haobo Xi, Zhe Ma, Mingxing Yuan (* equal contribution)
IEEE Conference on Robotics and Automation (ICRA)Accepted. 2026
In this article, we propose an efficient dual-layer exploration planning method. The insight of our dual-layer planning method is efficiently finding an acceptable long-term region routing and greedily exploring the target in the first region of routing at high speed. Specifically, we propose a long-term region routing approximate algorithm, called “exploration-oriented heuristic double-tree algorithm”, to ensure real-time planning in large-scale environments. Then, the viewpoint in the first routing region with the highest curvature-penalized score, which can effectively reduce decelerations caused by sharp turn motions, will be chosen as the next exploration target. To further speed up the exploration, we propose an aggressive and safe exploration-oriented trajectory planning approach to enhance exploration continuity and speed. The proposed method is compared with state-of-the-art methods in challenging simulation environments.
R-VoxelMap: Accurate Voxel Mapping With Recursive Plane Fitting for Online LiDAR Odometry
[Code] [ieee] [arxiv] [bilibili]
Haobo Xi, Shiyong Zhang, Qianli Dong, Yunze Tong, Songyang Wu, Jing Yuan, Xuebo Zhang
IEEE Robotics and Automation Letters (RAL) 2026
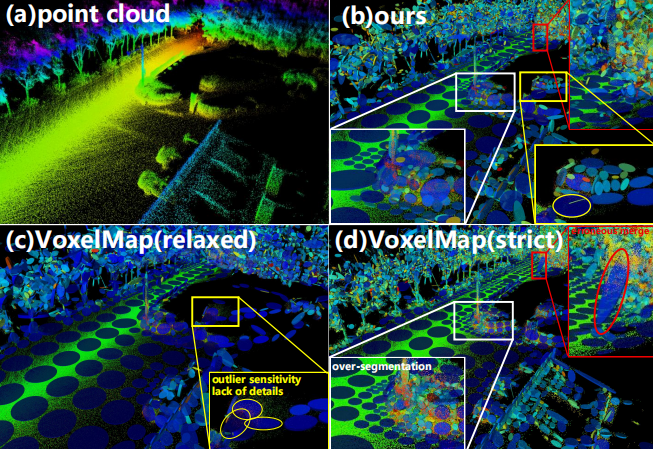
This letter proposes R-VoxelMap, a novel voxel mapping method that constructs accurate voxel maps using a geometry-driven recursive plane fitting strategy to enhance the localization accuracy of online LiDAR odometry. VoxelMap and its variants typically fit and check planes using all points in a voxel, which may lead to plane parameter deviation caused by outliers, over segmentation of large planes, and incorrect merging across different physical planes. To address these issues, R-VoxelMap utilizes a geometry-driven recursive construction strategy based on an outlier detect-and-reuse pipeline. Specifically, for each voxel, accurate planes are first fitted while separating outliers using random sample consensus (RANSAC). The remaining outliers are then propagated to deeper octree levels for recursive processing, ensuring a detailed representation of the environment. In addition, a point distribution-based validity check algorithm is devised to prevent erroneous plane merging.
R-VoxelMap: Accurate Voxel Mapping With Recursive Plane Fitting for Online LiDAR Odometry
[Code] [ieee] [arxiv] [bilibili]
Haobo Xi, Shiyong Zhang, Qianli Dong, Yunze Tong, Songyang Wu, Jing Yuan, Xuebo Zhang
IEEE Robotics and Automation Letters (RAL) 2026
This letter proposes R-VoxelMap, a novel voxel mapping method that constructs accurate voxel maps using a geometry-driven recursive plane fitting strategy to enhance the localization accuracy of online LiDAR odometry. VoxelMap and its variants typically fit and check planes using all points in a voxel, which may lead to plane parameter deviation caused by outliers, over segmentation of large planes, and incorrect merging across different physical planes. To address these issues, R-VoxelMap utilizes a geometry-driven recursive construction strategy based on an outlier detect-and-reuse pipeline. Specifically, for each voxel, accurate planes are first fitted while separating outliers using random sample consensus (RANSAC). The remaining outliers are then propagated to deeper octree levels for recursive processing, ensuring a detailed representation of the environment. In addition, a point distribution-based validity check algorithm is devised to prevent erroneous plane merging.
2025
EDEN: Efficient Dual-Layer Exploration Planning for Fast UAV Autonomous Exploration in Large 3-D Environments
[Code] [ieee] [arxiv] [bilibili] [youtube]
Qianli Dong, Xuebo Zhang, Shiyong Zhang, Ziyu Wang, Zhe Ma, Haobo Xi
IEEE Transactions on Industrial Electronics (T-IE) 2026
In this article, we propose an efficient dual-layer exploration planning method. The insight of our dual-layer planning method is efficiently finding an acceptable long-term region routing and greedily exploring the target in the first region of routing at high speed. Specifically, we propose a long-term region routing approximate algorithm, called “exploration-oriented heuristic double-tree algorithm”, to ensure real-time planning in large-scale environments. Then, the viewpoint in the first routing region with the highest curvature-penalized score, which can effectively reduce decelerations caused by sharp turn motions, will be chosen as the next exploration target. To further speed up the exploration, we propose an aggressive and safe exploration-oriented trajectory planning approach to enhance exploration continuity and speed. The proposed method is compared with state-of-the-art methods in challenging simulation environments.
EDEN: Efficient Dual-Layer Exploration Planning for Fast UAV Autonomous Exploration in Large 3-D Environments
[Code] [ieee] [arxiv] [bilibili] [youtube]
Qianli Dong, Xuebo Zhang, Shiyong Zhang, Ziyu Wang, Zhe Ma, Haobo Xi
IEEE Transactions on Industrial Electronics (T-IE) 2026
In this article, we propose an efficient dual-layer exploration planning method. The insight of our dual-layer planning method is efficiently finding an acceptable long-term region routing and greedily exploring the target in the first region of routing at high speed. Specifically, we propose a long-term region routing approximate algorithm, called “exploration-oriented heuristic double-tree algorithm”, to ensure real-time planning in large-scale environments. Then, the viewpoint in the first routing region with the highest curvature-penalized score, which can effectively reduce decelerations caused by sharp turn motions, will be chosen as the next exploration target. To further speed up the exploration, we propose an aggressive and safe exploration-oriented trajectory planning approach to enhance exploration continuity and speed. The proposed method is compared with state-of-the-art methods in challenging simulation environments.
FSMP: A Frontier-Sampling-Mixed Planner for Fast Autonomous Exploration of Complex and Large 3-D Environments
Shiyong Zhang, Xuebo Zhang, Qianli Dong, Ziyu Wang, Haobo Xi, Jing Yuan
IEEE Transactions on Instrumentation and Measurement (T-IM) 2025
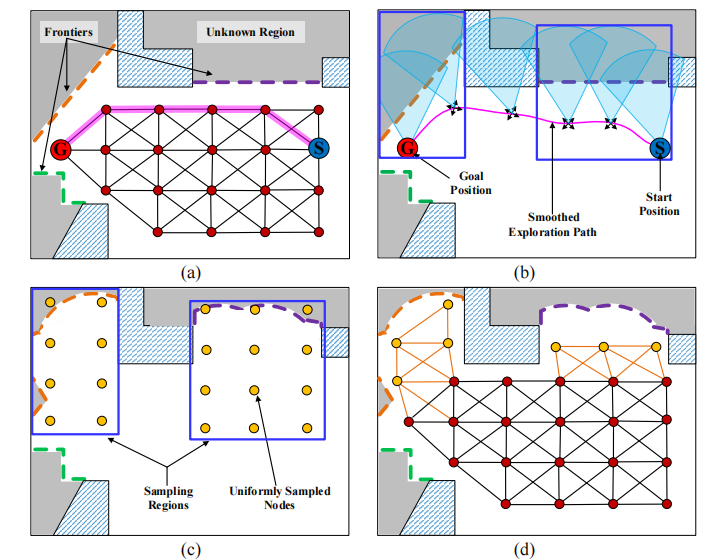
In this article, we propose a systematic framework for fast exploration of complex and large 3-D environments using micro aerial vehicles (MAVs). The key insight is the organic integration of the frontier- and sampling-based strategies that can achieve rapid global exploration of the environment. Specifically, a field-of-view (FOV)-based frontier detector with the guarantee of completeness and soundness is devised for identifying 3-D map frontiers. Different from random sampling-based methods, the deterministic sampling technique is employed to build and maintain an incremental road map based on the recorded sensor FOVs and newly detected frontiers. With the resulting road map, we propose a two-stage path planner. First, it quickly computes the global optimal exploration path on the road map using the lazy evaluation strategy. Then, the best exploration path is smoothed to further improve the exploration efficiency.
FSMP: A Frontier-Sampling-Mixed Planner for Fast Autonomous Exploration of Complex and Large 3-D Environments
Shiyong Zhang, Xuebo Zhang, Qianli Dong, Ziyu Wang, Haobo Xi, Jing Yuan
IEEE Transactions on Instrumentation and Measurement (T-IM) 2025
In this article, we propose a systematic framework for fast exploration of complex and large 3-D environments using micro aerial vehicles (MAVs). The key insight is the organic integration of the frontier- and sampling-based strategies that can achieve rapid global exploration of the environment. Specifically, a field-of-view (FOV)-based frontier detector with the guarantee of completeness and soundness is devised for identifying 3-D map frontiers. Different from random sampling-based methods, the deterministic sampling technique is employed to build and maintain an incremental road map based on the recorded sensor FOVs and newly detected frontiers. With the resulting road map, we propose a two-stage path planner. First, it quickly computes the global optimal exploration path on the road map using the lazy evaluation strategy. Then, the best exploration path is smoothed to further improve the exploration efficiency.
HIGHSTAR: High-Speed and Efficient Online Autonomous UAV Exploration
Qianli Dong, Xuebo Zhang, Shiyong Zhang, Ziyu Wang, Zhe Ma, Tianyi Li, Haobo Xi
IEEE Transactions on Automation Science and Engineering (T-ASE) 2025
This paper presents a consistent, high-speed, and efficient online autonomous UAV exploration method. First, a motion primitive activated graph search method is proposed to fully take advantage of the UAV’s current velocity and acceleration. It improves motion time cost evaluation by simulating short-term motion tendencies with motion primitives and reduces the computational cost by searching on a voxel graph with a dynamic upper bound. Then, a minimum time trajectory to the optimal viewpoint with a non-zero terminal velocity constraint in a convex hull is optimized. Finally, an SE(3) coverage trajectory for unknown space around the exploration path is further optimized.
HIGHSTAR: High-Speed and Efficient Online Autonomous UAV Exploration
Qianli Dong, Xuebo Zhang, Shiyong Zhang, Ziyu Wang, Zhe Ma, Tianyi Li, Haobo Xi
IEEE Transactions on Automation Science and Engineering (T-ASE) 2025
This paper presents a consistent, high-speed, and efficient online autonomous UAV exploration method. First, a motion primitive activated graph search method is proposed to fully take advantage of the UAV’s current velocity and acceleration. It improves motion time cost evaluation by simulating short-term motion tendencies with motion primitives and reduces the computational cost by searching on a voxel graph with a dynamic upper bound. Then, a minimum time trajectory to the optimal viewpoint with a non-zero terminal velocity constraint in a convex hull is optimized. Finally, an SE(3) coverage trajectory for unknown space around the exploration path is further optimized.
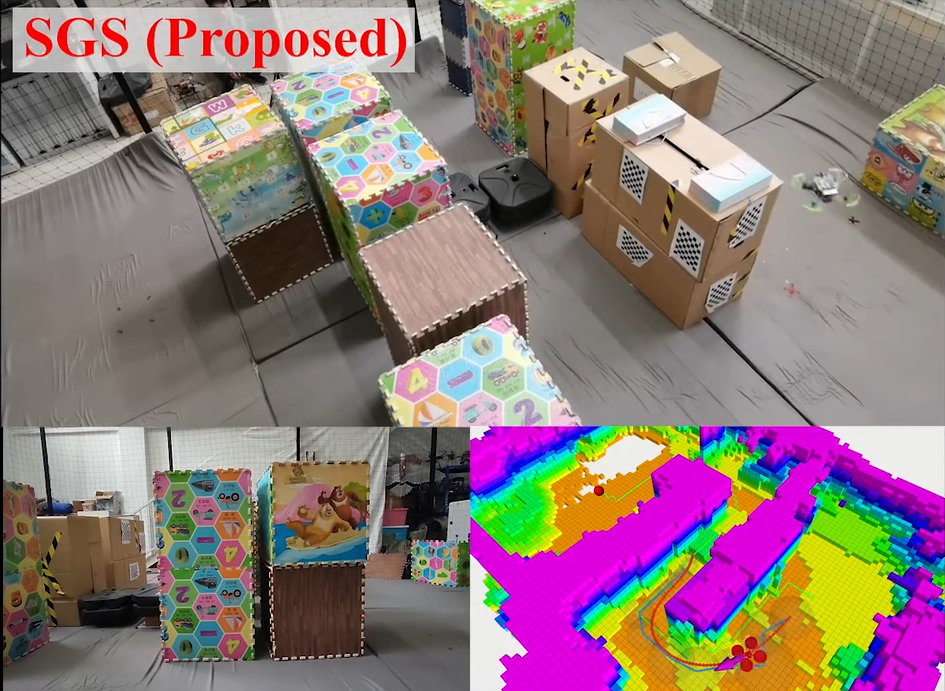
SGS-Planner: A Skeleton-Guided Spatiotemporal Motion Planner for Flight in Constrained Space
Tianyi Li, Shiyong Zhang, Xuebo Zhang, Qianli Dong, Junsheng Huang
IEEE/ASME Transactions on Mechatronics (T-MECH) 2025
This article proposes a skeleton-guided spatiotemporal motion planner (SGS-Planner) for safe and efficient aerial robot navigation in challenging constrained space. The planner takes advantage of a spatial-temporal hierarchical framework to generate a safer and more efficient trajectory rapidly. In spatial planning, different from existing approaches that either ignore the clearance between trajectories and obstacles or suffer from local minima, path smoothing is guided by a skeleton away from obstacles. Specifically, a fast sphere inflation-based skeleton extraction method is elaborately designed for high-clearance path searching. After that, we propose a skeleton-guided path smoothing approach to generate smooth and high-clearance paths, where the smoothing is formulated as unconstrained quadratic programs. In temporal planning, the feasible trajectory is generated along the optimized path by employing an optimal time allocation method and a parallel back-up strategy to guarantee the success of planning.
SGS-Planner: A Skeleton-Guided Spatiotemporal Motion Planner for Flight in Constrained Space
Tianyi Li, Shiyong Zhang, Xuebo Zhang, Qianli Dong, Junsheng Huang
IEEE/ASME Transactions on Mechatronics (T-MECH) 2025
This article proposes a skeleton-guided spatiotemporal motion planner (SGS-Planner) for safe and efficient aerial robot navigation in challenging constrained space. The planner takes advantage of a spatial-temporal hierarchical framework to generate a safer and more efficient trajectory rapidly. In spatial planning, different from existing approaches that either ignore the clearance between trajectories and obstacles or suffer from local minima, path smoothing is guided by a skeleton away from obstacles. Specifically, a fast sphere inflation-based skeleton extraction method is elaborately designed for high-clearance path searching. After that, we propose a skeleton-guided path smoothing approach to generate smooth and high-clearance paths, where the smoothing is formulated as unconstrained quadratic programs. In temporal planning, the feasible trajectory is generated along the optimized path by employing an optimal time allocation method and a parallel back-up strategy to guarantee the success of planning.
2024
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph
[Code] [ieee] [arxiv] [bilibili] [youtube]
Qianli Dong*, Haobo Xi*, Shiyong Zhang, Qingchen Bi, Tianyi Li, Ziyu Wang, Xuebo Zhang (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
In this paper, we propose a fast and communication-efficient multi-UAV exploration method for exploring large environments. We first design a multi-robot dynamic topological graph (MR-DTG) consisting of nodes representing the explored and exploring regions and edges connecting nodes. Supported by MR-DTG, our method achieves efficient communication by only transferring the necessary information required by exploration planning. To further improve the exploration efficiency, a hierarchical multi-UAV exploration method is devised using MR-DTG. Specifically, the graph Voronoi partition is used to allocate MR-DTG’s nodes to the closest UAVs, considering the actual motion cost, thus achieving reasonable task allocation. To our knowledge, this is the first work to address multi-UAV exploration using graph Voronoi partition. The proposed method is compared with a state-of-the-art method in simulations. The results show that the proposed method is able to reduce the exploration time and communication volume by up to 38.3% and 95.5%, respectively. Finally, the effectiveness of our method is validated in the real-world experiment with 6 UAVs.
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph
[Code] [ieee] [arxiv] [bilibili] [youtube]
Qianli Dong*, Haobo Xi*, Shiyong Zhang, Qingchen Bi, Tianyi Li, Ziyu Wang, Xuebo Zhang (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
In this paper, we propose a fast and communication-efficient multi-UAV exploration method for exploring large environments. We first design a multi-robot dynamic topological graph (MR-DTG) consisting of nodes representing the explored and exploring regions and edges connecting nodes. Supported by MR-DTG, our method achieves efficient communication by only transferring the necessary information required by exploration planning. To further improve the exploration efficiency, a hierarchical multi-UAV exploration method is devised using MR-DTG. Specifically, the graph Voronoi partition is used to allocate MR-DTG’s nodes to the closest UAVs, considering the actual motion cost, thus achieving reasonable task allocation. To our knowledge, this is the first work to address multi-UAV exploration using graph Voronoi partition. The proposed method is compared with a state-of-the-art method in simulations. The results show that the proposed method is able to reduce the exploration time and communication volume by up to 38.3% and 95.5%, respectively. Finally, the effectiveness of our method is validated in the real-world experiment with 6 UAVs.
2021

FAST-Dynamic-Vision: Detection and Tracking Dynamic Objects with Event and Depth Sensing
Botao He*, Haojia Li*, Siyuan Wu, Dong Wang, Zhiwei Zhang, Qianli Dong, Chao Xu, Fei Gao (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021
This paper presents a complete perception system including ego-motion compensation, object detection, and trajectory prediction for fast-moving dynamic objects with low latency and high precision. Firstly, we propose an accurate ego-motion compensation algorithm by considering both rotational and translational motion for more robust object detection. Then, for dynamic object detection, an event camera-based efficient regression algorithm is designed. Finally, we propose an optimization-based approach that asynchronously fuses event and depth cameras for trajectory prediction. Extensive real-world experiments and benchmarks are performed to validate our framework.
FAST-Dynamic-Vision: Detection and Tracking Dynamic Objects with Event and Depth Sensing
Botao He*, Haojia Li*, Siyuan Wu, Dong Wang, Zhiwei Zhang, Qianli Dong, Chao Xu, Fei Gao (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021
This paper presents a complete perception system including ego-motion compensation, object detection, and trajectory prediction for fast-moving dynamic objects with low latency and high precision. Firstly, we propose an accurate ego-motion compensation algorithm by considering both rotational and translational motion for more robust object detection. Then, for dynamic object detection, an event camera-based efficient regression algorithm is designed. Finally, we propose an optimization-based approach that asynchronously fuses event and depth cameras for trajectory prediction. Extensive real-world experiments and benchmarks are performed to validate our framework.